
I am currently a third - year Master’s student at the RAP Lab of Shanghai Jiao Tong University, supervised by Prof. Zhongqiang (Richard) Ren. My research direction focuses on Multi - Agent Path Finding Among Movable Obstacles.
I graduated with honors from the School of Robotics Science and Engineering at Northeastern University in 2023. During my undergraduate studies (2020–2023), I conducted research at the Ocean Heart Lab under the supervision of Prof. Hongli Xu.
Between February 2023 and May 2024, I was a core member of a startup team incubated at XbotPark Innovation Camp and MiraclePlus. Our project explored integrating AIGC with holographic projection to enhance human-computer interaction. The team secured seed funding (now exited), and I contributed to developing the real-time gesture recognition system that enabled intuitive user interaction with holographic avatars.
My current research interests lie at the intersection of Robotics, Multi-Agent Systems, and Large Language Models — particularly in grounding language in spatial understanding, robotic manipulation, and building world models for embodied AI.
🔥 News
I am seeking a Ph.D. position to start in Fall 2026. If my background aligns with your research, I would be grateful for the opportunity to discuss further. My CV is attached for your reference.
📝 Publications
🤖 Multi-Agent Path Finding & Robotics
🔍 Currently exploring better, more adaptive algorithms for dynamic environments — thesis as a springboard, not a conclusion.
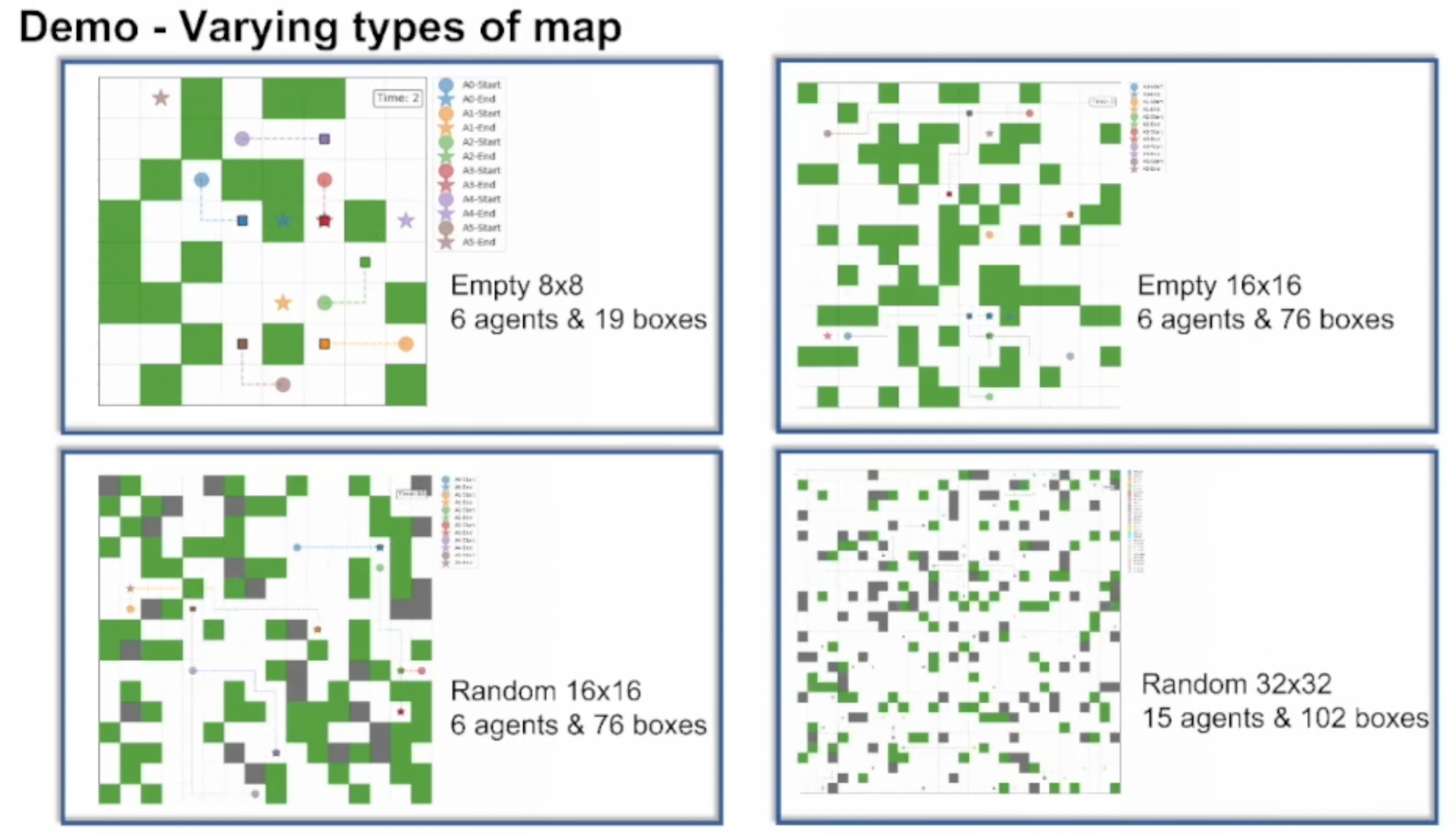
Conflict-Based Search and Prioritized Planning for Multi-Agent Path Finding Among Movable Obstacles (poster paper)
Shaoli Hu, Shizhe Zhao, Zhongqiang Ren
Conference | Paper | Video
- Proposes a series of approaches combining Conflict-Based Search (CBS) with Prioritized Planning for multi-agent path finding in dynamic environments with movable obstacles.
- Addresses the challenge of coordinating multiple agents while handling environmental constraints.
🔋 Fault diagnosis

Review of Fault Diagnosis based Protection Mechanisms for Battery Energy Storage Systems
Solomon N. Adasah, Ziqi Wang, Shaoli Hu, Skieler Capezza, Junya Shao, Mo-Yuen Chow
- Comprehensive review of fault diagnosis and protection mechanisms in battery energy storage systems.
- Covers state-of-the-art approaches for ensuring reliability and safety in energy storage applications.
🛸 UAV & Autonomous Systems & Multi-Agent

UAV Formation Obstacle Avoidance Based on Improved Consistency Algorithm
Shaoli Hu, Jiankai Tang, Chen Chen, Hongli Xu, Shuai Wang
- Develops an improved consistency algorithm for UAV formation control with obstacle avoidance.
- Demonstrates effective coordination strategies for multi-agent aerial systems.
🔬 Computer Vision & Image Processing

Sub-pixel Underwater Object Size Measurement Algorithm Based on Improved Otsu Binarization and Edge Curvature Filtering
Chen Chen, Hangbin Cao, Jun Liu, Shaoli Hu, Jingyu Ru, Hongli Xu
- Proposes a novel algorithm for precise underwater object measurement using advanced image processing techniques.
- Combines improved binarization and edge detection methods for enhanced accuracy.
🎬 Projects & Demos
Multi-Agent Systems
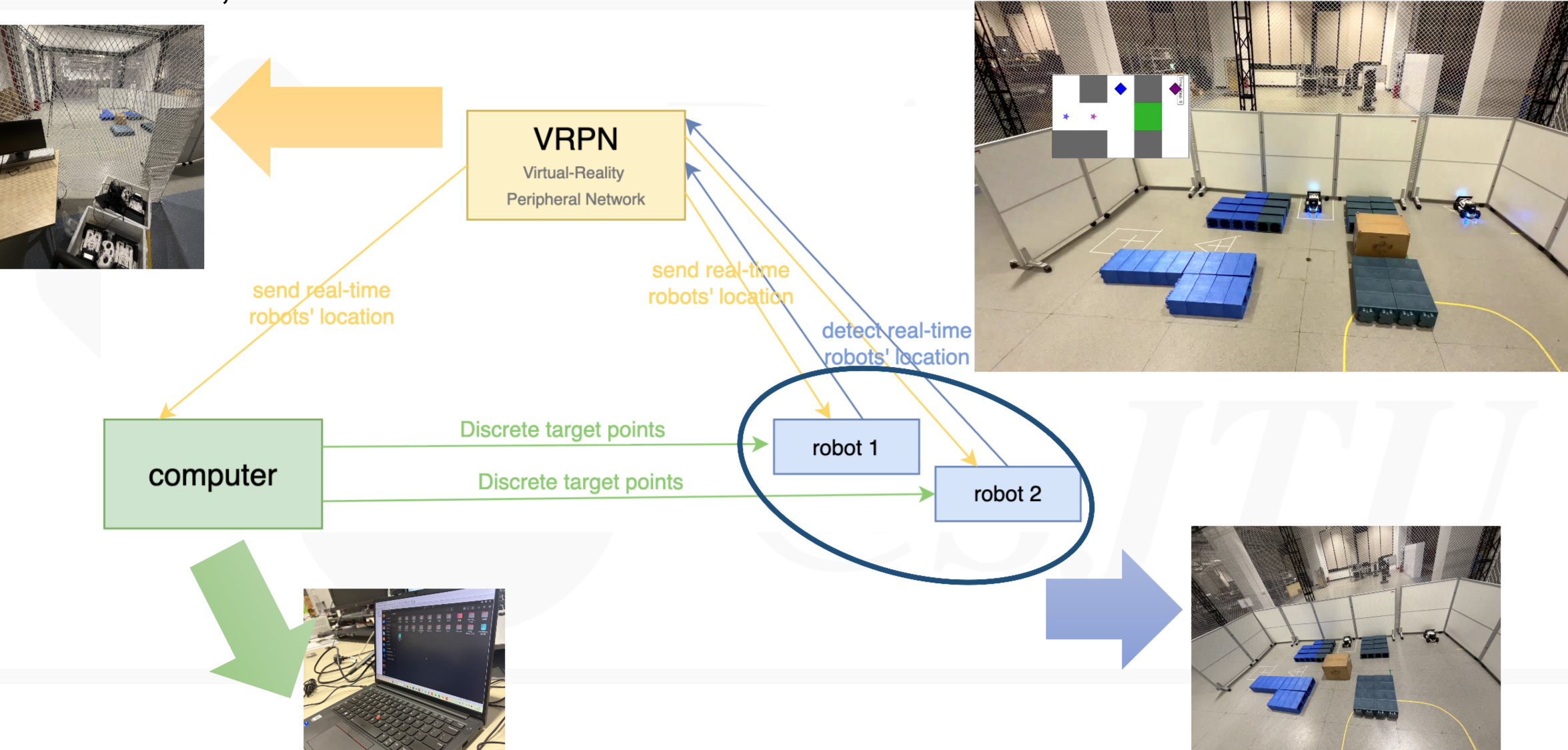
Multi-agent Path Planning – Coordinated Navigation Among Movable Obstacles
- Demonstrates coordinated navigation of multiple agents in dynamic environments with movable obstacles.
- Showcases real-time collision avoidance and path optimization algorithms.
- Highlights the practical application of multi-agent coordination research.

Battery Sandbox Demo – Fault Simulation and Communication Design (Collaboration with Siemens)
- Showcases fault simulation and diagnosis in battery energy storage systems.
- Demonstrates multi-agent communication protocols for system monitoring.
- Illustrates real-time fault detection and response mechanisms.
Robotics & Mechanical Engineering

Underwater Recovery Robot – Mechanical Design and Algorithm Implementatio (National College Student Innovation Training Program (National-Level))
- Features custom mechanical design for underwater navigation and object recovery.
- Implements advanced computer vision algorithms for target detection and tracking.
- Demonstrates integration of hardware control and software algorithms in a real-world system.
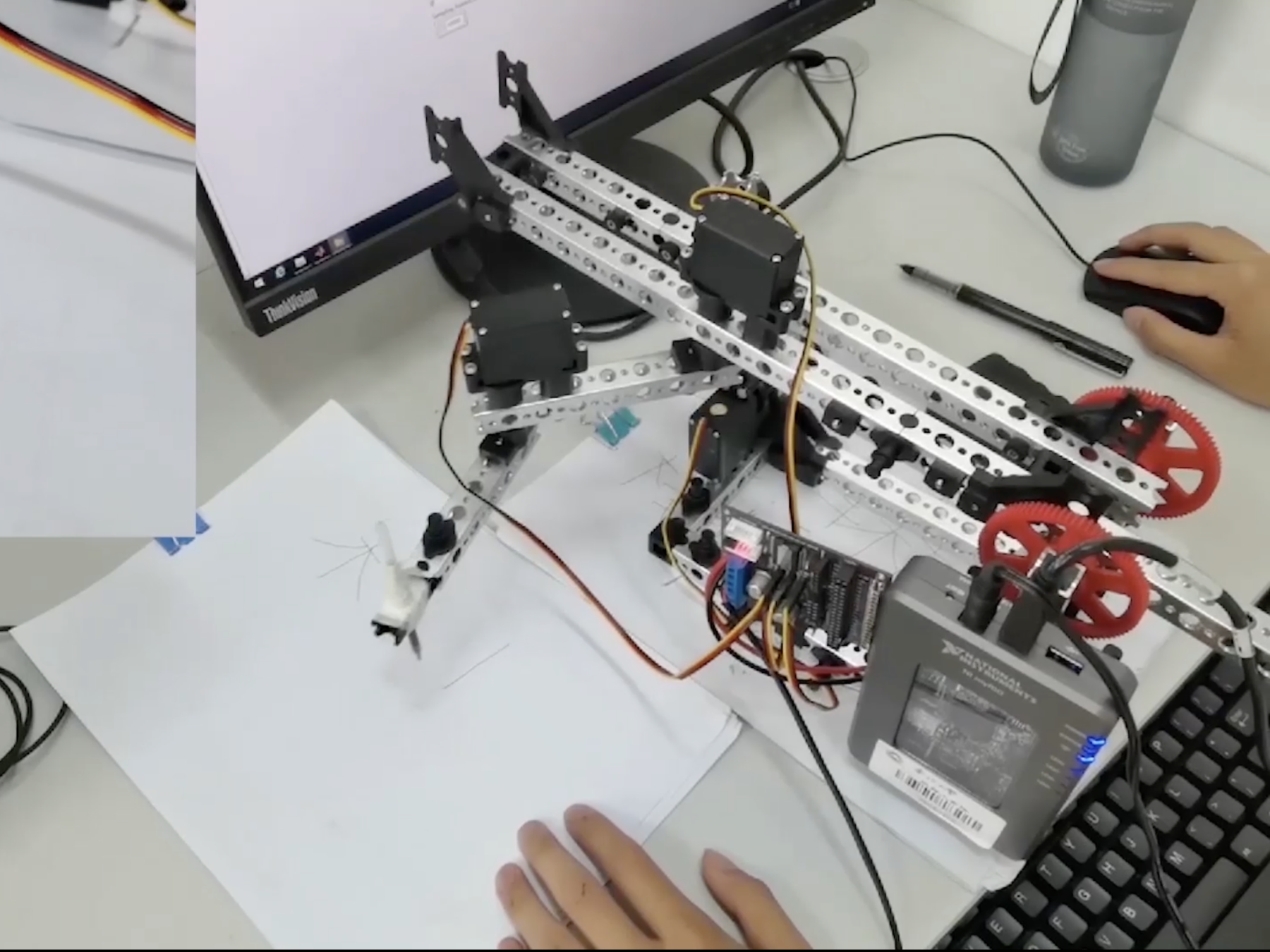
Drop-in Robotic Arm Calligrapher – LabVIEW-Based Chinese Character Writing
- Built from scratch using LabVIEW for real-time motion control and trajectory planning.
- Implements stroke-level character decomposition and kinematic calculations.
- Demonstrates precise robotic arm control for artistic applications.
AI & Computer Vision
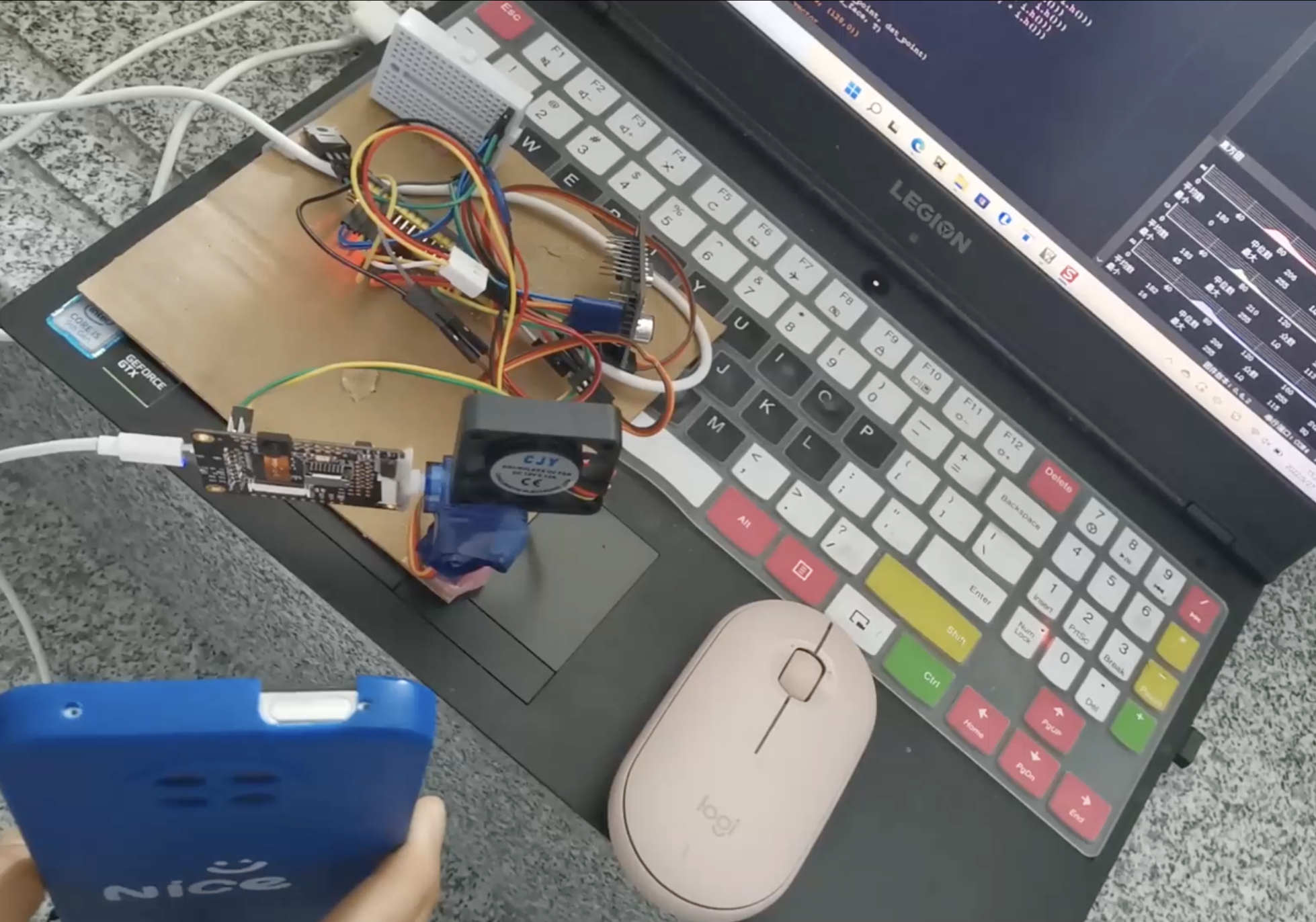
Smart Fan System – Voice Recognition, Face Detection, and Autonomous Tracking
- Integrates voice recognition for natural language command processing.
- Implements real-time face detection and tracking using computer vision.
- Features autonomous fan orientation adjustment based on detected user position.
🎖 Honors and Awards
Competitions and Awards
International Level
- Second Prize, Mathematical Contest in Modeling (MCM) — 2021, 2022
- Second Prize, Dimensional Cup International Competition — 2020
National Level
- Third Prize, China Robot Competition — 2022
- Third Prize, Twelfth National College Students’ Mathematics Competition — 2020
Regional Level
- First Prize, Eighth National Youth Science Popularization Innovation Experiment — 2022
- Second Prize, Computer Design Competition — 2022
- Second Prize, Mechanical Innovation Design Competition — 2022
- Second Prize, National College Students’ Mathematical Modeling Competition — 2021
- Second Prize, Twelfth National College Students’ Mathematics Competition — 2020
- Third Prize, Network Technology Challenge Competition — 2023
Honors and Titles
- Outstanding Graduate of Shanghai Jiao Tong University - 2026
- Merit Student of Shanghai Jiao Tong University (top 3%) — 2024, 2025
- Outstanding Graduate of Northeastern University (top 4%) — 2023
- Outstanding Participant, NingBo XbotPark — 2023
- HKCRC Campus Ambassador, Hong Kong Center for Construction Robotics — 2023
- Outstanding Student Model (top 1.3%) — 2020, 2021
Scholarships
- Shanghai Jiao Tong University Graduate Academic Scholarship — 2023, 2024, 2025
- First-Class Scholarship for Outstanding Students (top 3%) — 2020, 2021, 2022, 2023
🎒 Educations
- 2023.09 - 2026.03, M.S. in Control Science and Engineering, Shanghai Jiao Tong University
- 2019.09 - 2023.06, B.S. in Robotics Engineering, Northeastern University
- 2021.05 - 2021.08, Lecture Program about Humanities and Social Sciences, Osaka University
🧑💼 Internships
- 2024.12 - 2025.03, Ronovo Surgical.
- 2023.04 - 2023.09, XbotPark.